科技云:3款微型机器人
微型爬行机器人
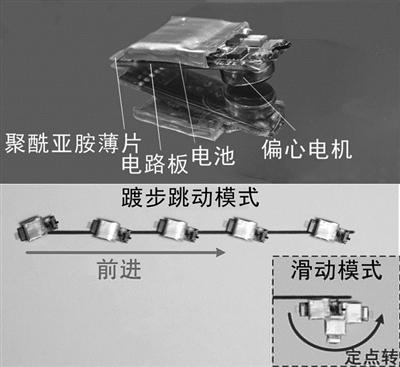
微型爬行机器人工作原理示意图
近日,《先进科学》杂志刊文称,哈尔滨工业大学研究人员研制出了一款重量仅有1.2克的微型爬行机器人。这款机器人在机械结构、驱动器配置等方面较为简单,可供大量复制。
受到海豹踱步跳动运动方式启发,研究人员引入偏心力驱动的多方向运动传递技术,实现了刚体机器人在欠驱动情况下的直行、弧行和转向等灵活运动,为单电机驱动的移动机器人设计提供了新思路。
据悉,得益于稳定和精确的运动,该机器人在没有反馈控制的情况下也能够有效执行任务。未来,该机器人所采用的驱动技术还可以与其他系统集成。例如,可以将移动电话的振动功能用于运动控制,从而实现诸如故障检测和目标跟踪等应用。
微型软磁性机器人

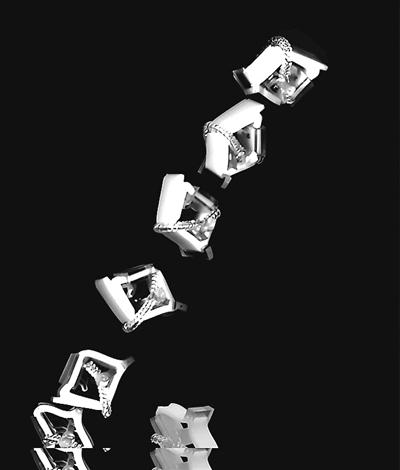
前不久,瑞士苏黎世联邦理工学院研究团队研制出了一款微型软磁性机器人。该机器人可以通过拍打身体与地面产生摩擦力,“蠕动”向前爬行。该项研究成果被刊登在《先进科学》期刊上。
该机器人整体由一片软磁性材料制成,通过改变软磁材料切割的形状和磁场的方向,达成控制整体运动路径的目的。如果调整参数,该机器人还能实现更复杂的爬行路径。
据称,微型软磁性机器人未来将有较为广泛的应用领域。例如,在环境监测方面,该机器人能够通过在不同的表面上爬行,收集环境数据;在空间探索方面,可以在太空中执行检查和维修太空站、收集样本和进行科学实验等任务。
微型蝗虫机器人
近期,美国伊利诺伊大学工程师团队研制出一款具有优异跳跃能力的微型蝗虫机器人,相关成果已发表于《智能材料与结构》杂志上。
受到蝗虫跳跃机制启发,研究人员成功利用卷绕人造肌肉执行器和投影增材制造技术,制造出这款机器人。
研究人员表示,该机器人移动性能较好,最远可跳跃其身体长度60倍的水平距离。同时,这款机器人成本低廉,能够进行大规模生产,使用效益较高。
据介绍,该机器人的开发对于农业和机械维护具有一定意义。预计未来该机器人可以通过配备传感器,实现收集农作物或机器内部数据的功能。

 皖公网安备 34112202000063号 皖ICP备11014802号-2 网站标识码:3411220021
皖公网安备 34112202000063号 皖ICP备11014802号-2 网站标识码:3411220021本网站支持IPv6访问 运维电话:0550-5621515